

Tesis de Ricardo A. Joaquín
Introducción
La ingeniería y la medicina entre otras varias profesiones, al trabajar juntas, suelen definir lo que se conoce como Biomecánica. Esta reduce la anatomía humana a modelos físicos más sencillos de estudiar y luego se hace la interpretación de los resultados por el cambio de las variables o por el camino inverso, para al ver los resultados del estudio en el modelo en el cuerpo humano propiamente dicho. Algo parecido a lo que se hacía en el pasado con los problemas matemáticos de difícil solución en ecuaciones diferenciales muy complejas, se transformaba todo a elementos logarítmicos, que simplificaban todas las operaciones matemáticas a simple aritmética, simples operaciones de sumas y restas de números reales y luego, con ese valor final, se volvía hacia atrás con anti logarítmicos y se obtenía el resultado del sistema original.
La Biomecánica tiene varias aplicaciones tales cómo, analizar los motivos de lesiones musculares para luego poder tratarlas adecuadamente, para desarrollar tratamientos para curarlas y evitarlas, también para el diseño ergonómico de los complementos terapéuticos y desde luego para el diseño de indumentaria deportiva. Un ejemplo muy conocido, es el del calzado deportivo. Sin lugar a dudas los fondistas y velocistas de los juegos en la antigua Atenas, no utilizaban calzado con la tecnología que se puede llegar a ver utilizar por los atletas de hoy, de hecho, es sabido que aquellos deportistas de antaño, realizaban sus prácticas sin calzado alguno, en realidad ni siquiera utilizaban prendas de vestir (1).
Para desarrollar la presente tesis, que trata los aspectos fundamentales y sus efectos de una de las herramientas o elementos de entrenamiento más distintivos del Karate Do Goju Ryu de Okinawa, el chi-ishi, hay que considerar una serie de definiciones y conceptos vinculados a la física clásica, qué vinculada a la anatomía humana, nos darán la visión de lo que definiremos como; ‘Biomecánica del Chi-ishi’.
No es objeto de esta tesis, desarrollar todos los aspectos de la Biomecánica como ciencia en sí, ya que la misma resulta de la interacción interdisciplinaria de la Medicina, Física e Ingeniería, por lo que no se podría resumir tres disciplinas en un solo trabajo y mucho menos en este escrito, no solo sería ambicioso, sino que técnicamente imposible ya que se deberían dominar todas estas disciplinas y suponiendo que ni siquiera se considera el aspecto de la Actividad Física y el Deporte que pone en juego otra gama de disciplinas como la Educación Física y las vinculadas a la medicina desde las consecuencias de las lesiones, rehabilitación, el diseño de los elementos o ergonomía, etc.. Para quienes interese informarse sobre esta ciencia y materias relacionadas, se indica la bibliografía de consulta y referencia que me ha brindado mi Sensei, para adentrarme y espiar un poco este fascinante mundo de la Biomecánica.
Objeto
El objeto de este análisis, es explicar de manera lo más sencilla posible, qué tiene de particular el entrenamiento con chi-ishi, que, otro elemento de carga no lo puede reemplazar de la misma manera y porqué interesa en la práctica del Karate do. No está dirigida a especialistas de ningún tipo, sino a practicantes inquietos de este bello arte, que tienen tanta curiosidad en el porqué, como en el cómo.
Por lo tanto, se buscarán las definiciones simples y conceptos más simplificados que nos permitan entender los procesos que se llevan a cabo al utilizar un chi-ishi y dado que son muchos y variados los ejercicios diseñados para este elemento, que generan efectos en cadenas musculares diferentes, nos centraremos solo en un ejercicio a manera de caso de estudio. Este análisis podría extrapolarse, a cualquiera de los ejercicios restantes, pero resultaría un estudio, una tesis de cada caso.
El caso de estudio será el ejercicio que en nuestra Escuela ha sido numerado como el Ejercicio N°1. En el link se encuentran los ocho ejercicios catalogados, desarrollados y explicados: http://jundokan.com.ar/, como fueron transmitidos por Osensei Juan Carlos Rodríguez a nuestro Sensei Pablo Scurzi, rokudan, Director de la AKKKA, de los cerca de trece o más, que se conocen como practicados en Okinawa.
Método
Encararemos la demostración del efecto del entrenamiento con chi-ishi, por comparación con otro elemento de entrenamiento clásico y de los más habituales, que puede hallarse en cualquier actividad deportiva, la mancuerna, que se sabe ya la usaban los antiguos griegos y que denominaban como las halteras (2).
Por comparación, se verán los efectos diferentes que generan el entrenamiento con uno y otro elemento. Elementos que en un principio podrían parecer semejantes, ya que a simple vista son simplemente pesos adaptados para tomarlos con la mano, no lo son. Y se verá qué, cada uno es específico o más adecuado para un aspecto diferente del entrenamiento y que no es útil reemplazar uno por el otro, sino utilizarlos para propósitos complementarios la fuerza y la potencia muscular.
A continuación, se dan muy breves conceptos y definiciones varias, funcionales al presente escrito.
BIOMECÁNICA
La definición de Biomecánica no ha alcanzado un consenso, ya que dependiendo de quién aborde el concepto se la intenta definir de manera general o de manera restringida o particular, por lo que consideraremos la que da la UNESCO en el International Council for Sport and Physical Education de 1971:
“Es la mecánica de los seres vivos. Comprende el conocimiento del papel que desempeñan las fuerzas mecánicas que producen los movimientos, su soporte anatómico, iniciación neuronal, control integrado, percepción, así como su diseño central”.
La Biomecánica suele dividirse en CINEMÁTICA y CINÉTICA:
- CINEMÁTICA: describe el movimiento de manera de sistema, sitúa espacialmente los cuerpos, mediante coordenadas y ángulos, y detalla sus movimientos basándose en los términos de desplazamientos (recorridos), velocidades y aceleraciones.
- CINÉTICA: Cuando el movimiento, “dinámica” o la falta de éste, “estática”, se relacionan con las fuerzas que los provocan, se habla en forma genérica de “cinética”.
- Dinámica: estudio de las fuerzas que provocan el movimiento.
- Estática: estudio de las fuerzas que determinan que los cuerpos se mantengan en equilibrio.
El estudio biomecánico de una parte del cuerpo o de una actividad física, se realiza mediante un modelo que simplifique la cantidad de variables, considerando solo las más relevantes. Así, no será el mismo modelo biomecánico para un ejercicio realizado desde el punto de vista muscular que desde el punto vista fisiológico. Según lo que se busque analizar, la biomecánica puede estudiar los músculos, el sistema circulatorio, el nervioso y todo sistema involucrado, pero cada modelo difiere según el sistema observado y de esta manera la biomecánica se vale de la física, la hidráulica, química, etc.
Para nuestro caso de estudio, utilizaremos la Física Clásica y las matemáticas básicas.
CENTRO DE MASA o de GRAVEDAD (G)
Todo cuerpo posee un punto en el que podemos considerar como si, toda la masa de este fuese puntual o una pequeña esfera con el peso completo del cuerpo.
En general, una forma sencilla de determinar el centro de masas en un cuerpo homogéneo y regular, es simplemente encontrar el centro geométrico del mismo.
El problema de hallar el centro de masas, suele complicarse en cuerpos de formas irregulares o no geométricas, para ello se puede recurrir a métodos matemáticos como ecuaciones que consideran igualdades o inecuaciones con integrales o de una manera más sencilla, descomponer al cuerpo en formas geométricas simples y luego ir componiendo estos centros de gravedad auxiliares hasta obtener el centro de masas del cuerpo por aproximaciones sucesivas. Lo que se busca es que las áreas sean equivalentes, ya que si las partes son de diferentes materiales, se tendrán para áreas iguales pesos distintos. El famoso ejemplo, que se pregunta en tono de broma: ¿qué pesa más, 1 kg de plomo o 1 kg de plumas?. Desde luego que ambos pesan lo mismo, el tema es que 1 kg de plomo será una pieza de un tamaño pequeño, de poco volumen y 1 kg de plumas, será un montículo de gran volumen. Por lo tanto, se ve que no es tan sencillo determinar el centro de gravedad de un elemento irregular construido además con materiales diversos. Se suele calcular con una función matemática, que se conoce como “integral”, que es conceptualmente una función matemática que permite realizar la suma de partes infinitesimales y que pueden considerarse iguales.
El centro G, también puede encontrarse considerando los vectores representativos de los pesos de las partes que se pueden individualizar, en el caso del chi-ishi; el peso y el mango. Y resolver con ecuaciones de momentos estáticos, es decir, realizar ecuaciones buscando la distancia en un eje que atraviesa los elementos, tal que, a esa distancia si se pone un apoyo, el elemento se encuentra en equilibrio estático. Una forma de realizar esto mismo, es vectorialmente y resolverlo gráficamente. Se traslada el vector diferencia al extremo opuesto al vector mayor y se lo invierte de sentido, es decir se lo gira 180°. Se une el extremo del vector más grande con este vector diferencial con el extremo del vector más chico, copiado en la posición del más grande y dónde la recta corta el eje, se encuentra el centro de gravedad.

Sistema gráfico de resolución para hallar el centro de gravedad G,
A los fines prácticos, el método gráfico para resolver por dónde pasa el centro de masas se ve en la figura 2.

En nuestro caso lo consideramos un objeto ideal y concentrado solo en la parte del peso propiamente dicho y al mango lo consideramos como un vínculo sin “masa”.
Por lo que nuestro chi-ishi resultante será uno tal qué, su peso será el “G”, ubicado en el centro geométrico del peso y su mango no tendrá peso y será del largo “d”, determinados antes.

En el cuerpo humano, podemos pensar intuitivamente que el centro de masas está cercano al ombligo, en un punto que, si nos imaginamos atravesados por una línea vertical, en cuanto esta se desplaza del área de los pies, genera una condición de equilibrio inestable hasta que la desviación es tal que caemos.

PALANCA Y MOMENTO DE UNA FUERZA
Una palanca está formada por tres componentes: el brazo de resistencia, el punto de apoyo y el eje de rotación. Se consideran tres sistemas de palancas: de primer grado, segundo grado o de tercer grado, cuando se tiene un sistema con el que se mueve un peso, con una tabla, varilla o palanca, considerando un punto de apoyo, pivote o fulcro y se aplica una fuerza o potencia para lograr su desplazamiento. Según dónde se ubiquen la fuerza y el fulcro, respecto de la resistencia o peso a mover, queda definida la palanca. Con estos simples gráficos identificaremos claramente los tres tipos.
Palanca de primer grado

Palanca de segundo grado

Palanca de tercer grado

Nos interesa estudiar particularmente las palancas de primer y de tercer grado.
FUERZA (F)
Definiremos el concepto de fuerza, de manera operacional, en el lenguaje cotidiano, una fuerza se asocia a un empuje o un tirón que se le aplica a un cuerpo para desplazarlo. Cuando esa fuerza la realiza la Tierra, la denominamos gravedad o fuerza de gravedad. Por lo tanto, el peso de un cuerpo, es la mínima fuerza que se le debe aplicar a ese cuerpo, para vencer la fuerza de la gravedad y moverlo o es la fuerza que se debe aplicar para sostenerlo sin que caiga. Con este concepto el peso suele coincidir con la masa de un cuerpo en un mismo sistema de referencia. Se tiene que la masa de un cuerpo es una propiedad fundamental de este, pero debe distinguirse que en sistemas de referencia diferentes no coinciden, así, una persona que en la Tierra pesa 70 kg en la Luna pesa algo menos de 12 kg, no obstante, la masa de su cuerpo es la misma, ya que no pierde masa. De todas formas, lo importante es que la masa es invariable, es decir, es constante.
SEGUNDA LEY DE NEWTON
La segunda ley del movimiento de Newton, establece la proporcionalidad entre el concepto de aplicar una fuerza sobre un cuerpo de masa (m) y la aceleración que tendrá este al moverse. La ley establece que la sumatoria de todas las fuerzas aplicadas sobre el cuerpo, será igual al producto de su masa por la aceleración obtenida:
∑ F = m . a
Dónde “F” es la Fuerza, “m” la masa del cuerpo y “a”, la aceleración que tendrá el cuerpo al aplicarse la fuerza total F.
Se define como unidad de medida de una fuerza, en el Sistema Internacional, al Newton (N).
Dado que la masa de un cuerpo, como dijimos, es una propiedad fundamental de este, no varía, es constante para un mismo sistema de referencia, como el peso es la fuerza de gravedad, el peso de un cuerpo varía según la fuerza de gravedad, por lo que no será el mismo peso de un cuerpo en la Tierra que en otro planeta o satélite como la Luna, pero su masa sí será la misma. Por lo que se ve, la relación directa entre fuerza aplicada o a aplicar y la aceleración que obtendrá el cuerpo empujado o sometido a tracción. Es decir, para un mismo cuerpo, cuanto mayor sea la fuerza aplicada, mayor será la aceleración obtenida y viceversa, es decir cuanto mayor sea la aceleración, mayor habrá sido la fuerza aplicada sobre este.
TRABAJO MECÁNICO (W)
Se define como trabajo mecánico, al resultado de la fuerza aplicada necesaria para mover un cuerpo cierta distancia, es decir que:
W = F . d
Dónde “W” es Trabajo mecánico (Work) resultante de empujar el cuerpo considerado con una fuerza “F”, durante una distancia “d”..
Se define la unidad del trabajo en el Sistema Internacional, como el Joule.
POTENCIA (P)
El concepto de trabajo mecánico, pareciera incompleto, es decir no nos brinda mucha más información que el trabajo necesario o el aplicar una fuerza sobre un cuerpo en una distancia, pero nada dice que para llevar un cuerpo desde el punto “A” al “B”, la energía no será la misma si se hace a poca velocidad o gran velocidad. Se ve intuitivamente que no es lo mismo desplazar un cuerpo lentamente que tener que hacerlo rápidamente. Aquí aparece entonces el concepto de Potencia mecánica, que vincula el trabajo mecánico con la velocidad en que este se realiza.
La Potencia media será, el trabajo que se realiza en un intervalo de tiempo, Dt

Dónde “P” es la Potencia mecánica desarrollada, al realizar el trabajo mecánico “W” en el intervalo de tiempo “Dt ”.
Si ese intervalo de tiempo se lo hace lo más corto posible, es decir, tiende a cero, tendremos la Potencia en un tiempo instantáneo, es decir, la Potencia instantánea. Para hacer eso, se hace uso del concepto matemático de límite de una función:

De considerar los pequeños cambios incrementales del trabajo en la unidad de tiempo, y como el trabajo (W), es la fuerza (F) realizada para mover el cuerpo una distancia (d), si la potencia es constante en el tiempo y consideramos los pequeños cambios incrementales de distancia en los incrementales de tiempo y la expresión de Potencia Mecánica queda expresada en virtud de la velocidad:
P = F . v
Esta relación entre la fuerza F y la velocidad del cuerpo, define claramente el concepto de potencia mecánica (P) , ya que, para una misma fuerza, a mayor velocidad mayor la potencia.
La unidad usual de medida de la Potencia mecánica, es el J/s, o como normalmente se lo denomina: Watt, (W).
MOMENTO DE UNA FUERZA (MtF)
Se define como momento de una fuerza, al producto del módulo o valor absoluto de la fuerza F, multiplicado por la distancia o longitud (l) desde el punto de aplicación de la fuerza a un punto considerado fijo respecto del movimiento del cuerpo. Esa distancia se conoce como brazo de potencia.
MtF= F . l
La unidad de Momento, es la resultante de las magnitudes que intervienen, el Newton*metro, (Nm) en el Sistema Internacional y kilográmetro (kgm) en el Sistema Técnico.
El momento de una fuerza, se lo representa vectorialmente como un vector que sigue la regla de la mano derecha y ubicado en el eje de giro. No obstante, no aplicaremos aritmética vectorial, sino de magnitudes o módulos.
El concepto de Momento de una fuerza es uno de los más comunes en biomecánica y responde a casi todos los efectos físicos que aparecen al aplicar fuerzas o de la interacción del cuerpo humano con los objetos o masas con las que interactúa.
Las unidades físicas, han sido nombradas en honor a los hombres que han dedicado su vida al estudio de la Física de partículas o Física Clásica, por ello es que se tiene el Joule, por James Prescott Joule, el Newton por Isaac Newton y Watt por James Watt. Si es de interés profundizar sobre Física Clásica, consultar la bibliografía.
ANATOMÍA HUMANA
El cuerpo humano se lo divide a grandes rasgos en tres partes: cabeza, tronco y extremidades. Y estas últimas se las divide en miembros superiores o brazos y miembros inferiores o piernas.
El sistema que da sustento o estructura al cuerpo humano a la vez que protección, es el esqueleto o sistema óseo. Sobre este sistema, se encuentra el sistema muscular, el que permite el movimiento físico y mecánico del cuerpo, mediante la acción de las cadenas de músculos, por contracción y relajación de los mismos. La irrigación y alimentación del sistema muscular, se realiza mediante el sistema circulatorio a través de las arterias y venas. El control de los músculos, se realiza mediante el sistema nervioso central, que, a través de los neurotransmisores, permite monitorear el entorno y comunicar al cerebro con el sistema muscular. El conjunto de huesos y músculos, dan además protección y cabida a los órganos que componen los diferentes sistemas del cuerpo humano: cerebro, corazón, pulmones, etc.
Existen dos tipos de movimientos en el cuerpo humano, los voluntarios y los involuntarios o automáticos.
Los movimientos automáticos e involuntarios, son los que realizan los procesos encargados de mantenernos vivos, son los responsables de que podamos respirar, de que llegue la sangre a cada una de las células del organismo completo, y que, por ejemplo, ante una alarma sensorial, como cuando percibimos calor extremo, retiremos rápidamente la mano de una flama, si la intensidad de la luz es muy alta cerremos los ojos o si algo nos agrede, nos retiremos para que el dolor o la amenaza cese.
Los movimientos voluntarios son aquellos que realizamos de manera consciente o intencional. No obstante, el cerebro tiene una particularidad muy significativa, una vez que aprende una rutina, tiende a convertir actos voluntarios en automáticos, es así como para caminar no pensamos en que debemos mover un pie y luego el otro, el cerebro solo llama a la subrutina “caminar” y el “CPU” ejecuta. Desde luego, no tienen las mismas características de los actos involuntarios, ya que se inician con una orden del cerebro, un deseo o voluntad de manifiesto.
El cuerpo humano inicia un movimiento con una orden en el cerebro, la envía al cerebelo que, a través de los neurotransmisores por un efecto electroquímico, viaja a través del sistema nervioso central y llega al músculo como un pulso eléctrico que le ordena su acción, activa las unidades motoras que excitan las fibras musculares.
Los sentidos permiten la retroalimentación del movimiento y ya sea mediante la vista, el oído, el tacto o incluso la memoria, corregir, detener, acelerar, aumentar la magnitud, intensidad y duración de una acción.
En un simple movimiento como saludar estando de pie, se activan una gran serie de cadenas musculares que van desde los músculos que terminan en las falanges o dedos, antebrazo, brazo, hombro, hasta inclusive podría decirse que las piernas mismas que, aunque sea despreciable, ya que no se percibe o no tiene un efecto apreciable real, están equilibrando el pequeño cambio del centro de masa del cuerpo, que se produce por alejar la mano del cuerpo. En realidad, todo el cuerpo está interviniendo en el solo aspecto de mantenerse de pie y en equilibrio, basta con ver una persona que ha consumido alcohol en grandes cantidades, las dificultades que tiene por mantener el equilibrio del cuerpo, ya que el alcohol impide en gran parte la coordinación natural que realizamos normalmente para estar de pie, caminar, es decir, que el “CPU” pueda acceder libre y adecuadamente a las subrutinas de acciones comunes, de acciones voluntarias automatizadas.
Con esto en mente, resulta sencillo entender que cuando realizamos un ejercicio físico, no es lógico pensar que solo un músculo se ve afectado, sino que inevitablemente, habrá cadenas musculares que se ven directa o indirectamente afectadas o bien, que unas intervienen de manera relevante y otras en un grado inapreciable, pero que indudablemente, no es un solo músculo aislado el que está actuando.
Desde luego, al realizar ejercitación localizada, lo que se busca es favorecer o involucrar principalmente a una cadena de músculos específicos, de los cuales, uno o varios, se verán especialmente alcanzados por la actividad física. Por eso, se diseñan ejercicios o actividades físicas en busca de este desarrollo, tales como los conocidos ejercicios de abdominales, dónde se busca ir actuando sobre el músculo recto del abdomen o sobre el oblicuo externo o sobre el que se quiera fortalecer, pero desde luego, inevitablemente estarán involucrados otros músculos como los dorsales, espinales; qué, aunque en menor grado de acción, no puede negarse su participación, ya sea como parte de aporte al movimiento o como compensador o antagonista según sea el caso.
La realidad es que, por sencillo que parezca un movimiento, la complejidad con la que funciona el cuerpo humano es muy grande para resolverla simplemente y si se tienen en cuenta todos los factores y actores involucrados, parece algo titánico de comprender o abarcar. Por ello, el aborde que se suele hacer desde la biomecánica, se realiza por modelado de los elementos principales que intervienen en una acción, ya sea reemplazando por magnitudes físicas medibles, como por modelos matemáticos que mediante ecuaciones representan las variables de importancia, considerando las menos significativas como constantes o bien despreciables debido a su ignota incidencia en el resultado en particular que se busca, cuando se realiza el estudio analítico de un movimiento o acción o también por observación empírica, mediante el registro de datos obtenidos de maneras diversas, que implican medir magnitudes físicas y fisiológicas y buscar su interrelación.
Lo más difícil será, considerar qué factores son los que intervienen, sin dejar ninguna variable de importancia fuera del estudio, ahí reside la pericia y la experiencia de los especialistas.
En realidad, no es una sola de estas técnicas, sino el conjunto de todas ellas. Hoy en día, realizar un estudio biomecánico suele implicar que un individuo o un grupo con características similares o totalmente diferentes, realicen una actividad o acción específica y todo el proceso sea monitoreado mediante sensores electrónicos conectados a un procesador o computadora que, mediante una interfase, interpreta estos datos y por softwares adecuados, se pueden registrar y representar como vectores físicos o matrices de puntos tridimensionales, que, mediante algoritmos, dan índices que son interpretados por los diferentes profesionales que intervienen y desde luego, se han desarrollado programas que disponen rápidamente de todos los datos y los transforma en gráficos más amigables de comprender. De esta manera, se pueden obtener estadísticamente datos sobre el comportamiento del cuerpo y las exigencias para realizar diferentes actividades. Así, se pueden desarrollar estrategias terapéuticas para combatir dolencias comunes, diseñar elementos deportivos, ergonómicos, que faciliten la práctica deportiva, la hagan más confortable o se puedan realizar mejores logros y técnicas más efectivas o desarrollar prótesis para compensación o reemplazo de partes del cuerpo humano.
Gracias a la biomecánica no solo los atletas paraolímpicos pueden realizar sus deportes sino, las personas que han sufrido algún tipo de amputación, pueden restablecer la mayoría de las funciones motoras antes de la pérdida de uno de sus miembros.
En lo que respecta al diseño, basta con ver la indumentaria de los deportistas como ha ido variando con el tiempo más allá de las modas y de los objetivos comerciales, una muestra de estos cambios suele verse a menudo en los Juego Olímpicos, con los deportistas de alto rendimiento y como la indumentaria, los elementos deportivos, han hecho que los records sean cada vez más exigentes. Por ejemplo, si vemos las bicicletas actuales poco tienen que ver con las de los Juegos Olímpicos de Atenas de 1896, el ciclismo ha evolucionado tanto en la aerodinámica de las bicicletas en sí como en su ergonomía respecto del atleta. El uso de cintas adhesivas anti-desgarro, para dar mayor seguridad a los músculos más exigidos, etc.
Los fabricantes de indumentaria y elementos deportivos comprendieron rápidamente la necesidad de realizar estudios biomecánicos para ofrecer productos que debido a su impacto en el entrenamiento sean más buscados por los atletas. Y, como se comentó antes, uno de los elementos con mayor evolución en ese sentido ha sido el calzado deportivo, sin lugar a dudas. Y también las plantillas de calzado común. Por ejemplo, una de las dolencias comunes cuando alguien sufre de dolores de espalda y consulta un traumatólogo, es común que el profesional determine que se deba a condiciones de postura, afecciones en los pies como la falta de arco plantar o pie plano, etc. Siendo lo habitual que se indique, además de ejercicios para corregir la postura y fortalecer los músculos que ayuden a la posición correcta, el cambio de calzado y/o uso de plantillas que se diseñan buscando compensar los apoyos o falta de estos o corregir la huella plantar lo que repercute directamente en la postura y con ello se modifica la intervención de cadenas musculares, que, por actuar en una mala postura en provocan esfuerzos de músculos sobre
exigidos, produciendo fatigas y hasta lesiones de fibras musculares en lugares del cuerpo muy alejados de los pies.
En los casos como el mencionado, el paciente debe realizar una re-educación con terapia ocupacional y ver un ortopedista que realiza un estudio del apoyo y del caminar de la persona y diseña los apósitos o plantillas que se requieran. En el pasado, el estudio se realizaba pisando láminas que, por presión imprimían la huella o resaltaban las zonas de mayor presión plantar y la ausencia de contacto de las mismas con el suelo. Así también, se observaba la manera de caminar y muchas veces ese caminar se realizaba sobre alfombras acondicionadas para registrar las huellas del andar. Luego con esos datos se realizaba el diseño de las plantillas que debían usarse en el calzado.
Si bien, hoy día esto mismo es lo que se realiza, los métodos de registro han evolucionado y el registro del apoyo y el andar se realiza con sistemas electrónicos y digitales que son recabados por una computadora, se filma o registra el movimiento, según la ubicación espacial que transmiten sensores que se ubican sobre los miembros inferiores. No implica que no se puedan seguir utilizando métodos tradicionales, pero, en definitiva, de una manera u otra, lo que se registran son magnitudes propias de la biomecánica del movimiento, la cinética, la estática y la dinámica del andar, que permiten de una manera bastante precisa, resolver las cuestiones que generan las dolencias comunes por postura o el andar de una persona o bien, como se comentaba antes, poder realizar un estudio de una posible mejora en el rendimiento de un atleta.
Así mismo, se han desarrollado sensores de tensión muscular, presión, temperatura, velocidad, etc., para la mayoría de las partes del cuerpo humano, involucradas en la actividad física deportiva.
Para el desarrollo de la presente tesis, nada de esto se llevará a cabo, por no tener acceso a estos sofisticados elementos de registro de la acción muscular y porque se verá de manera sencilla e intuitiva, las acciones musculares principales de una manera analítica. Los efectos sobre los músculos principales que intervienen en la biomecánica del chi-ishi, así como también con el uso de una mancuerna; que es el objeto elegido para realizar un estudio comparativo, los veremos al realizar un análisis teórico mediante un modelado simple con elementos de la física clásica. Entre los anexos, se podrá encontrar como realizar los cálculos para el modelado matricial matemático por elementos finitos, del brazo como elemento físico.
En nuestro caso, reemplazaremos el brazo y la carga, por un modelo físico simple que nos represente lo más sencillo y lo mejor posible en términos de valores numéricos, todo el proceso de la ejercitación y los cambios que afectarán a los músculos principales.
MIEMBROS SUPERIORES
De los miembros superiores o brazos, daremos definiciones de los componentes principales que interesan al presente trabajo, por lo que nos concentraremos solo en los referentes al antebrazo, no así a los del brazo ni la mano, que, además de ser muy complejos, no presentan un punto de interés para analizar los efectos del entrenamiento con chi-ishi, en lo que respecta al caso de estudio elegido. Si bien, es indudable el fortalecimiento que se obtiene en las muñecas por la ejercitación periódica con este elemento, nos abocaremos a otro factor predominante que interesa resaltar en esta tesis, el kime.
Sistema óseo
Los miembros superiores están compuestos en su estructura ósea básicamente por:
- El brazo: posee un hueso grueso, denominado, húmero. Se inserta en un extremo en la articulación del hombro, con vínculo con la clavícula y en su otro extremo en articulación, con el codo.
- El ante brazo: posee dos huesos que trabajan en conjunto con vínculos en los extremos en las articulaciones del codo y de la muñeca. Estos huesos son el radio y el ulna o cúbito.
- La mano, que posee una gran cantidad de huesos que conforman la muñeca y las falanges o dedos, que van desde la articulación de la muñeca o articulación radiocarpiana, ya que el cúbito no participa directamente en su constitución, hasta las falanges distales o puntas de los dedos.
Sistema muscular
Los músculos más importantes que intervienen en la movilidad del brazo o conforman el sistema muscular primario de nuestro caso son:
- El brazo tiene por músculos principales o predominantes, los bíceps, tríceps y deltoides.
- El ante brazo, en cuanto a las funciones que nos interesan tienen dos grupos musculares que permiten la pronación y supinación, estos músculos se denominan: supinadores y pronadores redondo y cuadrado.
CHI-ISHI – PIEDRA DE POTENCIA
El chi-ishi, es un peso excéntrico o asimétrico, es decir, que se encuentra concentrado en un extremo de un mango opuesto al lugar desde dónde es tomado. Se cree que, originalmente se buscaba una piedra que tuviese una forma esférica, con alguna herramienta o huso, se lograba realizar un agujero pasante por uno de los ejes de esta esfera y se pasaba a través de este, un mango realizado con una caña o un palo de madera resistente, se acuñaba y aseguraba para impedir que el peso, la piedra, se deslizara. Seguramente se sumergía en agua para que la madera se hinchara y así aumentara la adhesión o fijación de la piedra. Luego, simplemente se realizaron con cemento en un molde y un mango adecuadamente fijado, como lo conocemos y fabricamos en la actualidad.

El chi-ishi es, tal vez, uno de los elementos más versátiles y sencillos del Hojo undo.
Para una reseña histórica sobre todos los elementos de entrenamiento de Karate do Goju ryu, se puede consultar, The Art of Hojo Undo – Michael Clarke. Los elementos de Hojo undo, son casi exclusivos del Karate, hay algunos elementos con finalidad similar en las artes marciales chinas como Win Chun, dónde, por ejemplo, con una finalidad similar a una de las aplicaciones que se busca con el chi-ishi, se utiliza una caña de bambú muy larga y se la toma de un extremo con ambas manos y se ejercita como si fuese una lanza,buscando hacer centro en un blanco sin soltarla, luego de agitarla violentamente lo que obliga a realizar grandes esfuerzos para equilibrarla y enfocarse en el blanco a estocar.
Entrenamiento con Chi-ishi
El ejercicio elegido para analizar es el número 1, que se detalla en la fig.9:
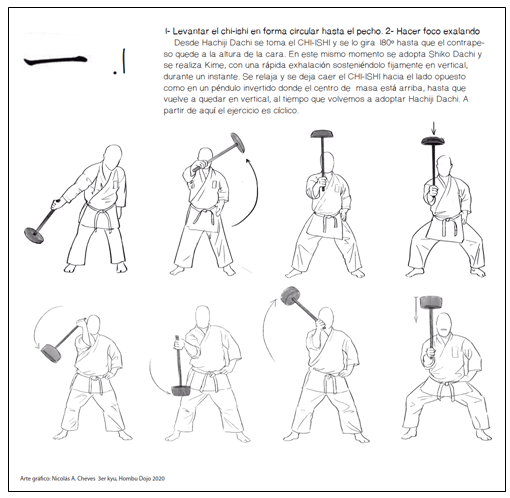
Puede verse que, uno de los aspectos en los que se enfoca este ejercicio, principalmente es en la pronación y supinación, movilidad que forma parte de los bloqueos básicos y los golpes de puño. Además de reforzar muscularmente esta torsión, mejora el kime buscado en el desarrollo final de la técnica.
Es decir, podemos intuir que el desarrollo de kihon uke: gedan barai uke (& uchi), chudan yoko uchi uke, jodan age uke (& uchi) y tsuki, tienen inequívocamente asociados la supinación y pronación, por la torsión que debe realizar el antebrazo. Y dado que, el kihon uke es común a todos los kata, se ve al ejercicio 1 como el más representativo de estudio y por ello fue elegido.
El kime, es la contracción rápida que se realiza al final de una técnica que, conlleva la acción efectiva de los músculos que intervienen en dicha técnica. Su traducción es algo así como: “decidir”, aunque quizás podamos considerar más como “definir”. Es como que, mientras se desarrolla el movimiento no hay una ‘certeza’, hasta que en el tramo final se “define” con el kime.
Consideraciones particulares de un golpe de puño, TSUKI
Veamos el caso particular de los golpes de puño, tsuki, ya que estos, deben ejecutarse como tirabuzón desarrollando con kime solo el último tercio del recorrido, pero no de manera constante, sino incremental desde la relajación a la contracción total y descarga en el foco o punto de impacto, el cual sabemos, en Goju ryu, lo consideramos una pulgada adentro del cuerpo a golpear.

Cuando ejecutamos un golpe de puño, sabemos que la técnica se centra en realizarlo lo más directo posible desde el hikite hasta el foco o punto de impacto, es decir, de la manera más eficiente posible, esto es, recorriendo la distancia más corta y de la manera más veloz posible. Esta distancia más eficiente, es una trayectoria recta que une dos puntos, el punto de inicio con el blanco, foco o punto destino.
Además, el puño rota, de encontrarse con la palma de la mano mirando hacia arriba en el hikite, a mirar hacia abajo en el punto de impacto, es decir una rotación de 180°, que debe desarrollarse progresivamente en todo el recorrido.
Otro factor fundamental es que, el puño debe viajar relajado los dos primeros tercios del recorrido, sin tensión muscular evidente que pueda frenar el movimiento y en el último tercio del recorrido se produce la contracción muscular, para ser completa al llegar a destino.
Tener simplemente en cuenta la tan conocida segunda ley del movimiento de la física clásica, que luego de desarrollarla queda resumida en su forma más simple:
F = m . a
Dónde: F: fuerza – m: masa – a: aceleración
Consideremos a (m) como la masa del puño, la cual es constante, por lo que, la fuerza del impacto, en definitiva, queda condicionada principalmente por la aceleración que se le imprima al desarrollo del golpe. Se ve claramente que, al resultar el valor final de la fuerza directamente proporcional a la aceleración, ya que el puño no cambia su masa, cuanto mayor sea la aceleración, mayor será la fuerza de impacto. Por lo tanto, para lograr la mayor aceleración es necesario que el puño, el brazo en general, viaje desde el origen relajado, es decir, sin tensión muscular que lo frene. Como desde luego, en el impacto, para poder transferir la fuerza el puño debe estar cerrado y contraído, el kime, la tensión muscular se debe realizar en el último tercio del recorrido, para garantizar que el golpe sea efectivo a máxima velocidad y máxima transferencia de energía. Una cosa que también ayuda a aumentar la estabilidad es el giro del puño, el “tirabuzón” que se realiza, mejora el desplazamiento por varias razones, pero la que nos interesa es que aumenta el momento angular.
Recordar que las armas de fuego, poseen en el cañón unas estrías que le imprimen al proyectil, movimiento angular; es decir, la bala no sale proyectada “derecha”, sino que se le imprime un momento angular que la hace girar sobre su propio eje, este giro, le permite mayor estabilidad, menor fricción y una forma más eficiente de cortar el medio que atraviesa.
Otro ejemplo, son las flechas, que poseen plumas en el extremo posterior, que le proporcionan el momento angular necesario para estabilizarlas.
Existen otros ejemplos en los que el movimiento angular optimiza la trayectoria, pero es suficiente saber qué, hace al golpe de puño, TSUKI, más eficiente.
Como el kime se relaciona en realidad con la potencia de un golpe, podemos auxiliarnos de la relación que indicamos antes, que vincula la potencia con la fuerza y la velocidad: P = F . v
Y acá se ve claramente que, cuánto más veloz se ejecute el golpe, para una misma fuerza se obtendrá una potencia mayor.
Otro aspecto fundamental en la transferencia y potencia de los golpes de puño, es utilizar la cadera, pero este aspecto se refiere además de comunicar cantidad de movimiento e inercia adicional del cuerpo, al hecho que vincula el puño con la base, con el ancla, el estribo dónde se hinca o la base dónde se fija el cuerpo, para que la reacción se vea canalizada lo mejor posible y se ha comprobado que ese aporte de la cadera, puede llegar a ser de ser más de un 30% adicional en el golpe.
Finalmente, la explicación de porqué se busca golpear solo con los nudillos del índice y el dedo medio y no con los cuatro nudillos, además de que no están en un mismo plano lo que lo hace difícil de por sí y que intentar hacerlo puede llevar a poner el puño de una manera que se doble la muñeca fácilmente con la consecuente lesión, obedece también a otra fórmula física, la de la presión ejercida por una fuerza sobre una superficie:
Presión = Fuerza / área
Es decir que la presión ejercida sobre una superficie, es inversamente proporcional al área. Vale decir, que ante dos TSUKI realizados con la misma fuerza, cuanto menor sea el área de impacto, mayor será la presión sobre el punto de impacto. Para el caso, un nakadaka ippon ken, resulta en un impacto mayor.
Retomando, uno de los factores más importantes al realizar un golpe de puño, tsuki, es el kime, el cual se desarrolla mejor con potencia muscular, más que como fuerza, de allí uno de los aspectos importante del entrenamiento con chi-ishi, qué, su principal característica es que desarrolla potencia muscular. Cómo se explicó antes, en las definiciones físicas, el concepto de potencia está vinculado al tiempo en forma inversamente proporcional, es decir que, cuanto menor sea el tiempo de actuación, mayor la potencia y esto es lo que ocurre cuando se realizan movimientos con el chi-ishi, ya que al girar el elemento la fuerza que se realiza es poca debido a que por los movimientos circulares aparecen inercias y momentos angulares que actúan de alguna manera como al empujar un vehículo con ruedas, que una vez en movimiento, la fuerza para mantener dicho movimiento es menor que para iniciar el mismo. Esto se debe a la ley de Conservación de la Cantidad de Movimiento, que establece que un cuerpo en reposo, mantiene esa condición lo mismo que un cuerpo que está en movimiento, tiende a mantener esa cantidad de movimiento, es lo que se conoce como Inercia. Por lo tanto, iniciar el movimiento de un chi-ishi requiere de potencia muscular lo mismo que para frenarlo, a diferencia de una mancuerna en la que la fuerza realizada es constante y los periodos de tiempos son largos por los que la potencia muscular requerida es mínima comparativamente. Realizar el mismo ejercicio con un elemento u otro, produce resultados diferentes.
Como ejemplo de algo que ocurre de manera análoga, se da entre una plataforma de equilibrio y una máquina de cuádriceps.
La diferencia de cómo actúan los músculos, es similar a lo que ocurre al utilizarse la plataforma de equilibrio, la que obliga a que los músculos de las piernas actúen de manera rápida y muy exigente en lapsos de tiempos extremadamente cortos y muy variables, ya que para mantener el equilibrio los músculos están precargados, tensos todo el tiempo de manera de poder corregir y mantener el centro de gravedad alineado con el eje de rotación y evitar caer, pasando el músculo de la precarga o tensión a la contracción o acción efectiva casi instantáneamente como un disparo y luego una descontracción rápida y violenta para pasar nuevamente a la tensión en espera.
El banco de cuádriceps en cambio, si bien lleva a la acción de cadenas musculares de las piernas que, eventualmente también impiden que la persona caiga, dependerá de cómo se utilice esta máquina, actuarán músculos determinados o con mayor predominancia, en tiempos de operación largos y constantes, produciéndose la tensión al mismo tiempo que el músculo trabaja todo el tiempo.
Como primera conclusión, se ve que la plataforma de equilibrio genera en los músculos de las piernas el desarrollo de potencia muscular, mientras que el banco de cuádriceps genera fuerza muscular. Esta diferencia, es la misma que se presenta con el entrenamiento del chi-ishi, que permite entrenar la potencia muscular de los brazos, contra la fuerza muscular que puede lograrse con el uso de mancuernas, al menos en lo que al ejercicio analizado se refiere y al entrenamiento del kime.
Pero volvamos a nuestro caso de estudio y analicemos desde el punto de vista de la física clásica, que tipo de elemento y carga nos representan el chi-ishi y la mancuerna, para que se vea que, en dos elementos que son simples pesos iguales, por comparación, aunque pesen lo mismo, su geometría y forma implican que se desarrollen potencias y fuerzas de manera preponderantes e inequívocas en cada caso.
Modelo mecánico del chi-ishi
Cómo se dijo antes, para poder realizar el estudio biomecánico, se suele diseñar o encontrar dentro de los elementos físicos conocidos, un modelo de estudio o ensayo, que nos permita ver análogamente que es lo que ocurre cuando se utiliza un elemento como el chi-ishi, y así estudiar cómo varían las fuerzas intervinientes. También se dijo antes que, en el presente trabajo se busca mostrar de manera simplificada el fenómeno y los efectos que ocurren en el entrenamiento con este elemento y para ello, se ha tomado como modelo físico, el sistema de palancas mecánicas descripto anteriormente.


Normalmente la posición final (8) no llega a ser de 360°, sino que es un ángulo menor, dado que resulta se tiene el límite físico de tensión muscular y si bien se puede llegar a rotar, se debe posicionar el codo forzado y no es funcional al ejercicio intentar hacerlo, pero a los fines del presente estudio, no presenta un error considerable, por lo que no se tendrá en cuenta y se considerará hasta 360°.
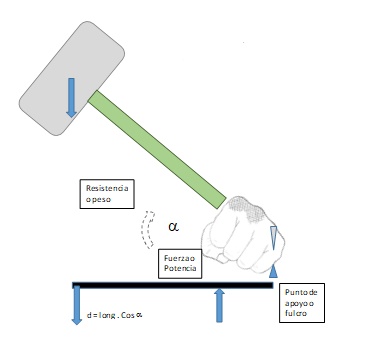
La tercera fase es el retorno a la posición (4) y la cuarta fase es volver a al punto de partida, por lo que, resultaría realizar las fases segunda y primera, en ese orden, pero en sentido de giro contrario o a contra fase. Las fases primera y segunda, se realizan en sentido horario y la tercera y cuarta, en sentido anti horario. En la primera fase del movimiento, según lo visto en palancas, vamos a asumir que el chi-ishi se comporta como una palanca de tercer género, quedando la potencia o fuerza a ejercer en la palanca en el pulgar y el punto de apoyo fulcro, en la eminencia hipotenar y la carga o resistencia en el extremo del chi-ishi o peso propiamente dicho. En realidad, la mano está aplicando un par motor, ya sea considerando una palanca de primer género, por lo que el pulgar sería el punto de apoyo o si bien, se considera en cambio, que es una palanca de tercer género y el apoyo es la eminencia hipotenar. De una forma u otra, los músculos que actúan principalmente en esta acción son los pronadores y lo hacen en la misma dirección y podemos considerar que no hay intervención del supinador, por lo que, podemos asumir que se comporta como una palanca de primer género o de tercer género, de manera indistinta. Lo que se modificarán serán las distancias relativas, pero en definitiva por uno u otro camino, el resultado será el mismo, es decir, la fuerza que se deberá hacer para lograr mover el chi-ishi. Por lo tanto, definiremos un tipo de palanca de manera arbitraria, solo para que quede claro cómo se realizan los cálculos y asumiremos esta para todo el cálculo.
Puede verse que la girar el chi-ishi, el peso se mantiene vertical ya que como dijimos antes, el peso no es más que la fuerza gravitacional de la tierra proporcional a la masa del cuerpo que se trate. Por lo tanto, la distancia respecto del punto de apoyo, será la proyección de la distancia desde el centro de gravedad a este punto de apoyo. Por trigonometría, esta proyección se obtiene por la función coseno del ángulo a.

Podría pensarse que la fuerza aplicada para realizar el giro, también cambia su distancia respecto del punto de apoyo, pero puede verse que, dado que punto de apoyo y fuerza aplicada en realidad son una cupla motora, la fuerza aplicada no se mantiene vertical (por no ser un peso o la fuerza de gravedad), sino que va girando y mantiene su distancia respecto del punto de apoyo qué, en definitiva, es el ancho de la mano. Por lo tanto, esta distancia a la que llamaremos D, cambiará con el coseno del ángulo a y d, la distancia entre apoyo y potencia, será constante.

Vamos a suponer los siguientes datos del modelo:
- Peso del chi-ishi => p=4 kg
- Largo del o longitud del mango => d1=50 cm
- Distancia entre apoyo y potencia aplicada => d= 10 cm
Posición inicial
Se puede ver que el brazo de palanca es el largo del mango del chi-ishi, pero en esta posición, el brazo de palanca es nulo, por estar en el mismo eje que que el fulcro, por lo tanto, calcularemos la cupla motora ejercida por la mano.

Vamos a suponer que el punto de apoyo que está en el extremo, está separado unos 10 cm del punto de aplicación de la fuerza, por lo tanto, la fuerza equilibrante o motora que debemos aplicar es:
M mano = p. d = 4 kg . 0,1 m = 0,4 kgm
f mano = M/ d = 0.4 kgm / 0,1 m = 4 kg
Esta es la fuerza instantánea, necesaria para iniciar el movimiento de rotación del chi-ishi, con la supinación del antebrazo.
A medida que el chi-ishi rota, el peso comienza a hacer resistencia y se va incrementando porque la palanca resultante es cada vez mayor hasta que se hace máxima cuando el peso queda alejado del fulcro la longitud total del mango, ya que la distancia d1, es la proyección sobre la horizontal. Como dijimos, así el brazo de palanca, pasa de ser nulo en la posición inicial a ser al largo del mango, d = long = 50 cm,en la posición intermedia (2), dónde el chi-ishi, queda paralelo al piso. A lo largo de la trayectoria circular, la distancia del peso respecto del fulcro, pasa a ser una función de la proyección horizontal, lo que sabemos se representa con la función trigonométrica, coseno del ángulo:
D= d 1 (long. Mango). cos a
Cuando el chi-ishi esté a 45° o luego a 135°, la fuerza que harán los supinadores será la misma:
M chi-ishi 135° = f. d = 4 kg . 0,5 m cos 135°= 1.4 kgm
f mano 45° = M/ d = 1.4 kgm / 0,1 m = 14 kg
Como se dijo, la posición de máxima fuerza es con el chi-ishi paralelo al piso, es decir cuando el ángulo respecto de la posición inicial es 90°.

M mano = p. d1 = 4 kg . 0,5 m = 2 kgm
f mano = M/ d = 2 kgm / 0,1 m = 20 kg
Cuando el ángulo es 180°, el coseno vale cero, es decir el momento es nulo, también se ve que la distancia respecto del eje es cero, por lo que la fuerza a realizar será igual al peso del chi-ishi, para mantenerlo vertical. En este punto, como en el inicio, antes de iniciar el movimiento, los músculos que actúan, son los del brazo (bíceps, tríceps, deltoides), los pronadores y el supinador solo han actuado en el arranque y luego, en el frenado, en la posición (4). Luego, en la posición vertical, el supinador y pronador se encuentran en tensión latente o casi isométrica, actuando rápidamente para estabilizar el peso y mantener el equilibrio.
Realizando los cálculos para los diferentes ángulos se tiene un cuadro, que nos permite ver como varía la fuerza a aplicar en el movimiento durante cada fase:
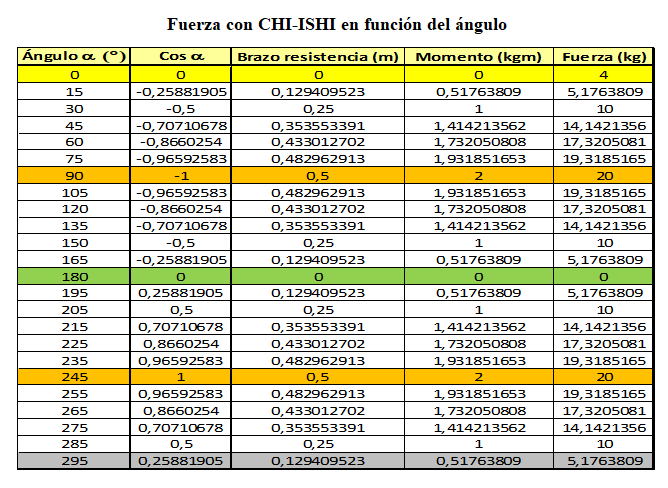
Se ve claramente que la variación es cosenoidal, por lo que, se ha hecho una corrección aritmética, ya que el coseno pasa a ser negativo, por ir cambiando de cuadrante y como aquí estamos considerando el valor de la fuerza en módulo, para nuestro caso, siempre será positivo.
Nótese, además, que se puso como fuerza inicial, el peso del chi-ishi, 4 kg, ya que es la fuerza mínima que hay que hacer para iniciar el movimiento, cuando no hay momento resistente.
Puede notarse el efecto característico de los movimientos cinéticos en general, debido a la inercia, en los que no se debe realizar la misma fuerza para iniciar el movimiento, que para mantenerlo o detenerlo y que hay momentos en los que el supinador no realiza fuerza apreciable alguna. Siendo la variación de la fuerza instantánea realizada con el chi-ishi en el movimiento circular de: 4 kg – 20 kg – 0 kg – 20 kg ~ 5kg.
Para el desarrollo de la fase de regreso a la posición inicial, ocurre exactamente lo mismo, con la diferencia que, al ser una pronación, el grupo muscular principal será el de los pronadores redondo y cuadrado.
Para ser estrictos, antes de comenzar el movimiento, la fuerza efectiva que realizan los supinadores o pronadores, según sea la fase del ejercicio, es 0 kg, pero inmediatamente de comenzado el ejercicio, es la calculada, que para el caso es el peso del chi-ishi, 4 kg, salvo para el inicio de la tercer fase, en dónde al iniciar ya hay una resistencia producida por el brazo de palanca al no concordar el peso con el eje del fulcro.
Puede suponerse que la primera y segunda fase se recorren en el gráfico mostrado en esta página de izquierda a derecha y que la tercer y cuarta fase, es recorrer esta curva de derecha a izquierda, en sintonía como se realiza el ejercicio de hecho.
Modelo comparado
Ahora veremos lo que ocurre con una mancuerna, que, se comporta como una palanca de primer grado.
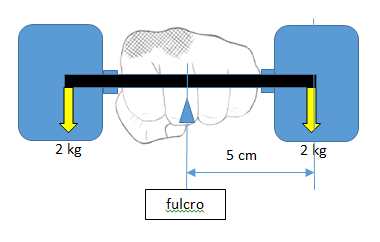
Consideraremos directamente la posición que vimos con el chi-ishi, es la de mayor exigencia, es decir, con el peso perpendicular al piso. Vamos a suponer una mancuerna de 4 kg, de manera que estaremos comparando exactamente los mismos pesos o masas, con un mango de 10 cm. Aquí, se verá justamente la influencia de la geometría de los elementos en estudio. En ambos casos, estamos suponiendo que el mango no tiene masa, consideramos una situación ideal en la que el peso está todo concentrado en
los centros de gravedad de los pesos propiamente dichos. Para el caso de la mancuerna, cada peso en los extremos pesa 2 kg.
Puede verse que el punto de apoyo a pasado al centro de la palma de la mano y que la eminencia hipotenar o la eminencia tenar ahora, son las que aplican la fuerza, según sea el sentido de giro. Se puede ver también que, el brazo de palanca es la mitad del largo de la mancuerna y el peso la mitad del peso total de la mancuerna, por lo tanto, el momento será:
M mancuerna = f. d = 2 kg . 0,05m= 0,1 kgm
Es decir que, para rotar una mancuerna de 4 kg, la fuerza que debe realizarse con los músculos supinadores y pronadores, es prácticamente de 2 kg.
Dado que aquí, al tomarla del medio, los pesos se equilibran y el momento resultante es nulo, ya que el momento que genera un disco de la pesa, lo compensa el otro disco. Estando el sistema en equilibrio, puede verse que el punto de apoyo soporta, por acción y reacción, el peso total de la mancuerna, es decir los 4 kg.
Vale decir que, para un mismo peso, dada la forma, la fuerza que deberán realizar los músculos del brazo son completamente diferentes. Para los supinadores y pronadores, la mancuerna pesa a lo sumo 2 kg.
Entonces, mientras con un Chi-Ishi la fuerza varia desde el simple peso del elemento hasta un máximo equivalente a 5 veces este, de acuerdo al ángulo del chi-ishi, en el caso de la mancuerna lo que se ve es que, dada la proximidad del peso al pivote y a la distribución, equidistante, el peso es constante.
Considerando solo el movimiento circular, nos detendremos en los músculos que actúan en la pronación y supinación. Vemos que, según el modelo de la mancuerna, palanca de primer género, la fuerza de músculos protagonistas y antagonistas es la misma, es decir que, al ser la mancuerna simétrica, la resistencia al movimiento que genera el peso de un extremo, se compensa con el peso a favor del movimiento del otro extremo. Vale decir que, para los músculos supinadores la exigencia es la misma que para los pronadores y será constante durante todo el movimiento, es decir que podríamos decir que cada grupo, realizan una fuerza constante de 2 kg cada uno.
Si bien en realidad el comportamiento de la mancuerna es similar al del chi-ishi, queda claro que la asimetría del chi-ishi, genera una amplitud de la fuerza muy diferente. Con la mancuerna, la amplitud es apenas el 10% de la amplitud con el chi-ishi. El rango de variación de la fuerza es de: (2 kg – 0 kg – 2 kg) y por la exigencia podemos pensar que en realidad la fuerza es la misma a lo largo de todo el recorrido y que, en definitiva, para el bíceps, es lo mismo cualquiera de estos elementos, en este ejercicio en particular; ya que la exigencia del bíceps se limita solo mantener o levantar el peso del elemento.
Conclusión caso de estudio
Queda bastante claro que el chi-ishi, para el ejercicio 1, exige alternativamente a los músculos supinadores y pronadores desde el arranque del movimiento, pasando por una rampa de exigencia constante a lo largo del movimiento, hasta el final por el frenado y equilibrio isométricos. Ese vencer la inercia estática y luego frenar la inercia dinámica, tiene de manifiesto una exigencia de POTENCIA MUSCULAR, que evidentemente la mancuerna no puede generar para este ejercicio, ya que, por su uso, lo que se exige a nivel muscular es FUERZA constante en el tiempo. Esto es claro, por ejemplo, al realizar bíceps, tríceps, deltoides, que son las ejercitaciones habituales para el entrenamiento con mancuernas, ya que
esa exigencia constante es la que resulta en engrosamiento de las fibras musculares, permitiendo que se gane masa muscular y que permite a lo largo del entrenamiento continuo, ir aumentando la carga a mover o progresivamente, ir retrasando el momento de fatiga con una misma carga, que no es lo buscado para desarrollar kime. Desde luego, se pueden realizar ejercicios con mancuernas para desarrollar potencia, por ejemplo, realizando desde el reposo una flexión violenta, exigirá al bíceps y tríceps, también en el arranque y el frenado, pero es evidente que el uso del chi-ishi, permite focalizar el entrenamiento de potencia con músculos de manera más puntual y además con una carga simple más baja que una mancuerna, ya que para lograr potencia con una mancuerna hay que buscar una que esté en el límite de fuerza del que ejecuta el ejercicio. Por otro lado, la versatilidad que presenta un chi-ishi es única, ya que al tomar el mango del extremo o en posiciones más cercanas al peso, permiten variar la carga dinámica acorde con la fuerza de quién realiza el ejercicio.
De nuevo, no implica que un elemento entrene específicamente un aspecto en particular y el otro no, inevitablemente al usar cualquier de estos elementos, ya sea en la búsqueda de obtener entrenamiento de fuerza o de potencia, se está entrenando en ambos aspectos, pero se está buscando que los músculos respondan de una manera determinada, favoreciendo uno u otro en mayor grado. Y, de nuevo, se ha focalizado sobre los músculos del antebrazo en particular, pero en cualquier ejercicio, se activarán cadenas musculares completas, para la ejecución del ejercicio en sí y para mantener el cuerpo en una posición estable y en equilibrio.
Por lo tanto, por su particularidad de desarrollar potencia muscular, es decir mucha fuerza en un instante muy corto de tiempo, en karate, el chi-ishi es, por todo lo visto, el elemento ideal de entrenamiento y desarrollo del kime.
Quedará la incógnita si el diseño de este elemento se hizo deliberadamente en la búsqueda de este efecto de obtener mejor kime o fue una simple ocurrencia de entrenar con los elementos que se tenían a mano y esto fue una consecuencia no esperada que, al cabo de su uso, se vio el beneficio asociado, pero eso a nuestro criterio, no es relevante.
Discusión final
Para quienes evalúen esta tesis, espero que haya quedado claro qué, lo descripto aquí, fue una posible explicación de algo que empíricamente se sabe; es decir, lo que se ha intentado demostrar mediante su biomecánica simplificada es, porqué el chi-ishi favorece el entrenamiento de la potencia muscular. Pero, una tesis no implica una verdad única y absoluta, incluso podría ser errónea y aun así ser válida, justamente por no ser cierta, pero ser una posible respuesta a descartar. La idea es, disparar también nuevos interrogantes o que la curiosidad sobre algún punto que ha quedado escondido en la oscuridad entre estas líneas, lleve a investigar y desarrollar nuevas posibles respuestas. En definitiva, en el debate está la riqueza de poder compartir el conocimiento y llevar luz a esos escondrijos que una vez iluminados, nos dan esa satisfacción de la comprensión, del entendimiento.
Quizás al que ha leído el presente trabajo hasta este punto, espero que alguno más a parte de los evaluadores y de los compañeros de práctica del dojo, a quienes molesté para correcciones y ver si se entendía lo escrito, les quede la misma cuestión que me surgió a mí y que va un poco más allá de entender la mecánica del chi-ishi en sí.
Está bien, la mancuerna en su uso común, favorece el desarrollo fuerza en el brazo y el chi-ishi potencia, pero, ¿cuál es la diferencia que se manifiesta en los músculos en cada caso?; o bien, sabemos que, si ejercitamos con una mancuerna de manera periódica, lograremos fuerza que se manifestará en un aumento progresivo de la masa muscular, pero, ¿qué ocurre a nivel muscular con el entrenamiento con chi-ishi?.
Para poder entender esto, hay que ver cómo está constituida la masa muscular, de qué partes se constituye un músculo esquelético.
El músculo y las fibras musculares
Un músculo está compuesto por diferentes tipos de fibras musculares, que se pueden clasificar en primera instancia, por su color, más o menos rojizo o más blanquecino que rojo, debido principalmente por como son irrigados por la mioglobina. La mioglobina es similar a la hemoglobina y su función principal es almacenar oxígeno.
Las fibras se pueden clasificar en fibras de tipo l, rojas, de contracción lenta (ST) y fibras del tipo ll, blancas, de contracción rápida (FT). Donde la diferencia en el color se debe al hecho de que, las fibras rojas tienen un contenido más elevado de mioglobina. En general, las fibras ST (tipo l) son de contracción lenta, de mayor resistencia a la fatiga y de color rojizo debido a que como dijimos son irrigadas con mioglobina, es decir, requieren mucho oxígeno. Con un diámetro menor, con una elevada capacidad oxidativa y con una baja capacidad glucolítica, es decir, baja capacidad de procesar la glucosa, que como sabemos es una fuente rápida de energía. Son fibras eficientes en el mantenimiento de la postura y para soportar una actividad prolongada de poca intensidad, como las carreras de fondo. Las fibras FT (tipo ll) se suelen dividir en fibras Fta (tipo llA) y las Ftb (tipo llB). Las Fta son fibras capaces de generar movimientos rápidos, repetitivos y son reclutadas después de las fibras ST. Poseen cierta resistencia a la fatiga recuperándose con bastante rapidez.
Las fibras de tipo llB son las que se contraen de forma más rápida, son de aspecto blanquecino, tienen un bajo contenido en mioglobina, eso indica que no tienen capacidad o necesidad de oxígeno, por lo que nos da una pauta que son las que se encargan de las actividades anaeróbicas. Estas fibras son de gran diámetro si se las compara con las fibras ST, tienen una elevada capacidad glucolítica, es decir de procesar la glucosa, una baja capacidad oxidativa y pocas mitocondrias. Se adaptan a los ejercicios de elevada potencia y se reclutan generalmente sólo cuando se requiere un esfuerzo muy rápido o muy intenso. Se fatigan rápidamente y recuperan su energía principalmente después de finalizar el ejercicio.
Por lo que, a medida que se realizan las series de ejercicios con mancuerna, de manera consecutiva y repetitiva, el cerebro manda la orden al mismo tiempo y se ve que todas las fibras empiezan a ser reclutadas de manera conjunta. Teniendo una participación destacada las rojas, que se adaptan mejor a la actividad aeróbica, lo que me permite realizar esfuerzos constantes con un grado de fatiga que se irá alejando en el tiempo con el entrenamiento periódico y continuo. En cambio, al entrenar con chi-ishi, si bien el cerebro sigue enviando la orden a todas las fibras al mismo tiempo, a medida que se realizan las series de ejercicios repetitivos, empieza a haber una anticipación infinitesimal de tiempo, al reclutar primero las fibras blanquecinas, que como dijimos, responden con potencia muscular, ya que no requieren gran capacidad de oxigenación por realizar una actividad básicamente anaeróbica, violenta y las que se fatigan
rápidamente justamente por esto, son capaces de desarrollar mucha fuerza, pero en lapsos muy cortos de tiempo, para luego dar paso a las rojas.
De nuevo, retomando con el concepto dado al principio, no se debe entender como que el chi-ishi, solo actuará sobre estas fibras musculares, ni desde luego solamente sobre los músculos principales del movimiento, para nuestro caso de estudio los pronadores y supinadores, sino que todas las fibras musculares son reclutadas por el cerebro, pero con las repeticiones rutinarias, se va evaluando el orden de prioridad. Luego, el movimiento es acompañado por el resto o son reclutadas en el momento necesario. En nuestro caso, con el ejercicio 1, es entendible que, para vencer la inercia del peso o en los puntos de mayor exigencia, el cerebro “primero” reclute todas las fibras musculares y una vez iniciado el movimiento, recordemos que es sencillo mantener girando el chi-ishi, se centre en las fibras rojas hasta que llega arriba, dónde nuevamente, para el frenado, todas tienen el mismo protagonismo.
Cualquiera de los asistentes a las clases de nuestro Sensei, cuando se ejercite con chi-ishi, puede atestiguar que no hay músculos simples que se ven afectados, sabemos al menos que, al día siguiente los músculos afectados son muchos más y podemos describir las cadenas musculares utilizadas sin problemas, músculos de los que ni sabíamos de su existencia o de su participación.
Como el organismo busca eficiencia, gastar la energía necesaria para una actividad, ni más ni menos, lo que tiende a ocurrir es lo que se dijo al principio, el cerebro tiene a convertir los actos repetitivos en rutinas o busca automatizar para que el proceso resulte eficiente. Por lo pronto, hasta que cambien las condiciones, por ejemplo, el tipo de ejercicio, el peso, etc. Esta automatización tiene por beneficio que, en algún punto se pueda llegar a desarrollar kime casi naturalmente. Desde luego, esto será después de muchísimo tiempo de práctica continua, ya que la mala noticia es que, la falta de práctica rutinaria hace que las rutinas que no son usadas periódicamente, el cerebro las almacena en el último cajón de los recuerdos o con el tiempo, las reduce hasta casi su descarte.
Ergo, en la búsqueda de entrenar fuerza muscular, es posible ver cambios en el volumen de los músculos, no obstante, si se busca entrenar potencia muscular, no habrá otros cambios visibles asociados, en lo que a fisonomía se refiere, pero sí será visible en la ejecución de kihon y kata.
Como comentario complementario, es evidente que el chi-ishi actúa sobre el tren superior, pero, ¿qué del tren inferior?. Entre los elementos del Hojo undo, pueden verse las geta, unas de madera, pensadas para mantener el equilibrio en la ejecución de entrenamiento de keri y otras pesadas, para fortalecimiento. Otra vez, una dupla similar a la de la mancuerna – chi-ishi, llevadas a otra región del cuerpo. Hoy día, se suma la ya mencionada plataforma de equilibrio, que es otro elemento que evidentemente por lo visto, servirá para el entrenamiento de kime del tren inferior. Pero eso, ya es motivo de otra tesis.
BIBLIOGRAFÍA
- Física 1, Resnick-Halliday
- The art of the Hojo Undo, M. Clarke
- Biomecánica y Bases Neuromusculares de la actividad física, M. Izquierdo
- Fisiología Articular, A. I. Kapanji
- Anatomía Humana 1 y 2, Latarjet-Ruiz Liard
- Técnicas de Rehabilitación en la medicina Deportiva, W. Prentice
- Terapéutica del ejercicio, Basmajian
- Biomecánica clínica, Marrero.
- Modelado matemático de un brazo. Bieda – Jaskot
- http://jundokan.com.ar/chi-ishi-%e6%b0%97-%e7%9f%b3-piedra-de-potencia/
- kime => https://fb.watch/6xr6EwwicO/
- https://www.lavoz.com.ar/deportes/atletismo/la-consagracion-de-pistorius-en-los-juegos-olimpicos-de-londres-2012/
- https://halteras.es/conoce-el-origen-de-halteras/
- http://jundokan.com.ar/
Créditos
